
Virtual Prototyping for Safer Product Development: Integrated Marine Propulsion and Steering System Example
Perillo Marco - EnginSoft (Italy)
Schiavazzi Daniele - EnginSoft (Italy)
Primavera Vito - EnginSoft (Italy)
Sacchi Daniele - ZF Marine (Italy)
PRESENTATION
Abstract
ZF Marine's POD Drive is an innovative marine integrated propulsion and steering system with increased performances compared to traditional shaftline systems in term of efficiency, manoeuvrability, ease of control and dimensions.
The system comprises an inboard/outboard transmission and double motor electrical steering pod system equipped with counter-rotating propellers. An electronic control system manages one or more PODs and each of them rotates independently, depending on maneuver typology, speed and turning circle.
Due to their manoeuvring orbital functions, operating conditions and under hull position, underwater impact risk assessment is demanded as important safety design requirement.
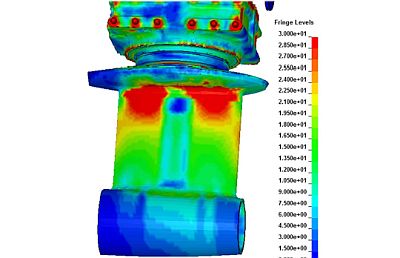
To decode any potential impact scenario into its design specification is a technical challenge concerning the capability to predict structural consequences. A new design methodology, that incorporates statistical approaches to investigate non deterministic factors that affect design impact conditions (e.g. impact velocity and angle, debris mass and stiffness, etc.) and Virtual Prototyping tools is developed to increase safety reliability of the design choices respect to accidental underwater impacts. Sensitivity analyses, parametric numerical models with increasing complexity and different simulation methods are employed during design process to design different sacrificial components able to break or to shear below the hull for minimizing damage to POD system or to the primary boat structures. Complete 3D numerical simulations are performed through LS-DYNA andfull scale experimental tests are carried out either to validate design process and numerical models or to compare numerical and experimental results.
