
Multidisciplinary Concurrent Engineering: V-FIDES Underwater Autonomous Vehicle hull design example
Pacini Francesco - WASS Whitehead Alenia Sistemi Subacquei (Italy)
Rossetti Fabio - EnginSoft (Italy)
Perillo Marco - EnginSoft (Italy)
Di Fazio Andrea - COMPOLAB (Italy)
Sgrò G. - COMPOLAB (Italy)
Abstract
An Autonomous Underwater Vehicle (AUV) is a robot able to execute missions without requiring input from an operator, or just with an external supervision. Its applications in commercial, scientific and defense areas need high level design requirements to satisfy requested operating capabilities, energy efficiency, speed and maneuverability performances, etc.
Operative missions require often performances "hard to match": precise control and manoeuvring, long endurance, wide volumes for payloads, minimum drag, etc.
Due to its particular and ambitious requirements a complete design process, able to involve contemporary multiple expertise, different technologies and various methodologies, is required for developing, building and operating an AUV system.
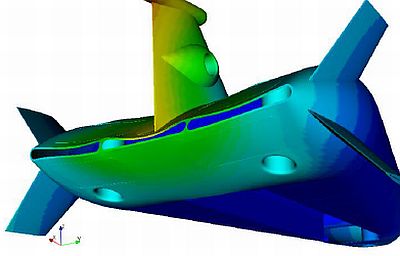
To predict any potential performance into several mission scenarios is a technical challenge concerning the capability to simulate hydrodynamic and structural conditions. A concurrent engineering design methodology, that incorporates virtual prototyping tools, is implemented from preliminary to definitive design, to optimize the vehicle configuration, according to the main requirements.
Complete 3D numerical simulations are performed through ANSYS and a prototype is built to validate design process and numerical models, by comparison between numerical data and experimental results.
